

摘要:晶体谐振器与机器人驱动装置在功能和原理上存在显著差异。晶体谐振器主要利用晶体材料的压电效应产生稳定的高频振荡,用于电子设备的时钟信号源和时间基准。而机器人驱动装置则是为机器人提供动力和执行指令的关键组件,通过电机和传动系统控制机器人的运动和操作。两者在应用领域和工作机制上有所不同。
本文目录导读:
晶体谐振器和机器人的驱动装置都是现代科技领域中的重要组成部分,它们在各自的领域发挥着至关重要的作用,尽管它们在技术上都扮演着为系统提供稳定、精确的动力来源的角色,但它们之间存在着显著的区别,本文将详细探讨晶体谐振器与机器人驱动装置的区别,帮助读者更好地理解这两个概念。
晶体谐振器概述
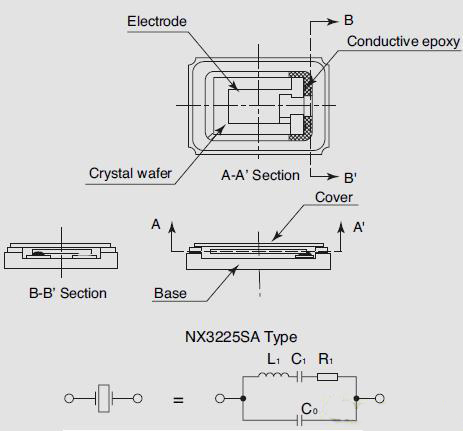
晶体谐振器是一种电子元件,它利用晶体材料的压电效应,将电能和机械能进行相互转换,晶体谐振器的主要功能是为电子设备提供精确且稳定的时钟信号,广泛应用于计算机、通信、仪表等领域,其主要特点包括体积小、重量轻、功耗低、频率稳定度高、可靠性好等。
机器人驱动装置概述
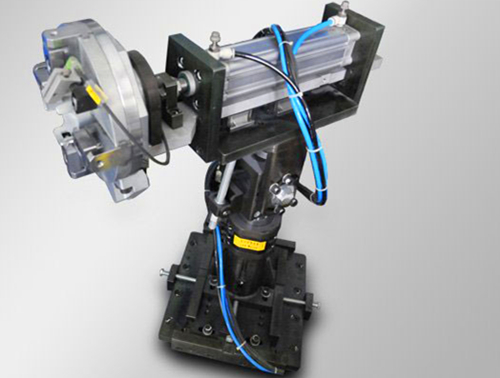
机器人驱动装置是机器人的重要组成部分,主要用于为机器人的运动提供动力,根据机器人的不同类型和应用场景,驱动装置可以采用不同的形式,如电动、液压、气动等,其主要功能是根据控制指令,将能量转换为机器人的运动动力,实现机器人的各种动作,机器人驱动装置的特点包括动力强劲、响应速度快、精度高、可靠性好等。
晶体谐振器与机器人驱动装置的区别
1、功能和用途:晶体谐振器主要提供精确稳定的时钟信号,为电子设备的工作提供时间基准;而机器人驱动装置主要为机器人的运动提供动力,实现机器人的各种动作。
2、工作原理:晶体谐振器利用压电效应,将电能和机械能进行相互转换,产生稳定的振荡信号;而机器人驱动装置则根据采用的能源形式(如电力、液压、气动等),将能量转换为机械动力。
3、应用领域:晶体谐振器广泛应用于计算机、通信、仪表等电子设备领域;而机器人驱动装置则应用于机器人工程领域,为各种类型的机器人提供动力。
4、性能特点:晶体谐振器具有体积小、重量轻、功耗低、频率稳定度高等特点;而机器人驱动装置则强调动力强劲、响应速度快、精度高等性能。
5、技术要求:晶体谐振器的技术要求主要关注其频率稳定性、温度特性等方面;而机器人驱动装置的技术要求则更关注其动力性能、响应速度、控制精度等方面。
实例分析
以某型号的四足机器人的驱动装置为例,该驱动装置采用电动形式,通过电机为机器人的运动提供动力,该驱动装置具有高动力性能、快速响应速度和高控制精度等特点,以确保机器人在复杂环境下的运动稳定性和灵活性,与此相比,晶体谐振器可能应用于该机器人的控制系统,为其提供精确稳定的时钟信号,以确保机器人动作的准确性和协调性。
晶体谐振器和机器人的驱动装置在功能、工作原理、应用领域、性能特点和技术要求等方面存在显著的区别,晶体谐振器主要为电子设备提供精确稳定的时钟信号,而机器人驱动装置则为机器人的运动提供动力,两者各自在其应用领域发挥着至关重要的作用,是现代科技不可或缺的部分。
展望
随着科技的不断发展,晶体谐振器和机器人驱动装置的技术也在不断进步,两者可能会在更高频率、更高精度、更智能化等方面取得突破,为电子设备和机器人领域的发展带来更多可能性,随着物联网、人工智能等技术的不断发展,晶体谐振器和机器人驱动装置的应用场景也将进一步拓展,为人们的生活带来更多便利。

本文详细探讨了晶体谐振器与机器人驱动装置的区别,包括功能、工作原理、应用领域、性能特点和技术要求等方面,通过实例分析,进一步说明了两者在实际应用中的差异,对两者未来的技术发展和应用前景进行了展望,希望通过本文的阐述,读者能更深入地了解晶体谐振器和机器人驱动装置的区别,为今后的学习和工作提供参考。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...